General Motors ha mostrado las primeras imágenes del Chevrolet Bolt autónomo de nivel 5, sin pedales, ni volante. El fabricante americano ha solicitado los permisos para desplegar una flota de vehículos sin conductor en 2019.
General Motors ha presentado una petición antes del Departamento de Transporte de Estados Unidos para operar una flota de vehículos totalmente autónomos, sin pedales ni volante en 2019. Paralelamente ha presentado las primeras imágenes de un Chevrolet Bolt que prescinde de los controles manuales. En su interior tan solo pantallas informativas y asientos para los pasajeros.
En 2016 General Motors adquirió la empresa Cruise Automation, que ya contaba con tres años de experiencia en vehículos autónomos, con el fin de sumar su software a sus propios desarrollos en la tecnología de la conducción autónoma.

Como resultado de esta integración General Motors ha presentado el Cruise AV, montado sobre un Bolt EV. En junio la compañía anunció la finalización del primer lote de 130 prototipos autónomos en su planta de ensamblaje de Orion.
El vehículo cuenta con cinco radares LiDAR, 16 cámaras y 21 radares convencionales. Estos sensores y cámaras escanean, en 360 alrededor del vehículo, tanto las zonas cercanas como las más alejadas. Con sus mediciones láser, los radares LiDAR proporcionan una imagen precisa de los objetos fijos y en movimiento, lo que permite medir su velocidad. Las mediciones de radar de pulso electromagnético son complementarias a los LiDAR y pueden detectar objetos sólidos que tienen poca reflectividad a la luz.
Los sistemas trabajan en conjunto para ofrecer al software datos suficientes para generar una imagen precisa de lo que rodea al vehículo y dotarle de capacidad de conducción autónoma e incluso de aprendizaje.
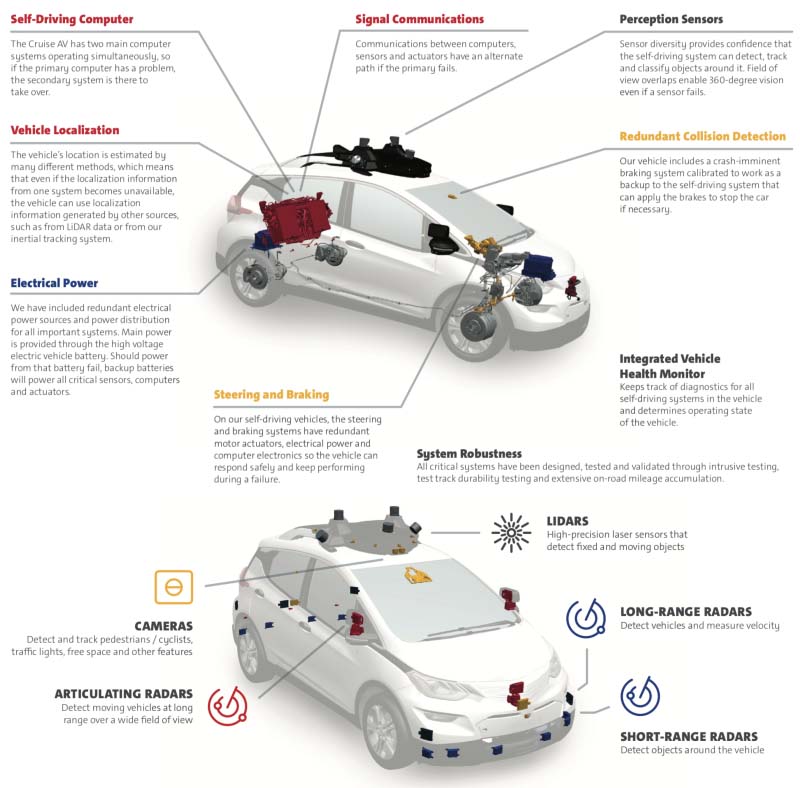
Las cámaras miden la intensidad de la luz reflejada o emitida por los objetos, proporcionando detalles muy exhaustivos sobre ellos. La combinación de todos estos datos permite al software clasificar y rastrear los objetos. Esto ayuda, por ejemplo, a identificar a los peatones, determinar el tipo de vehículo y detectar detalles de carreteras, como líneas de carriles y señalización.
Los sensores de largo alcance complementarios rastrean objetos de alta velocidad, como los vehículos que se aproximan y los sensores de corto alcance proporcionan detalles sobre los objetos en movimiento que está cerca del vehículo.
Publicista por la Universidad Complutense. Director comercial de publicaciones técnicas del sector de la energía durante doce años. Director de Energy News Events, S.L. desde 2012 difundiendo información en Energynews.es, movilidadelectrica.com e hidrogeno-verde.es. Y por supuesto, organizando eventos como VEM, la Feria del Vehículo Eléctrico de Madrid.